Rigid-Flex PCBs in Robotics: Key Enabling Technology for Humanoid and Industrial Systems

As robotics advances from traditional industrial automation toward humanoid robots, collaborative robots, autonomous mobile platforms, and wearable exoskeletons, electronic architectures are becoming increasingly complex.
Modern robots must integrate high-performance computing, multi-sensor perception, real-time communication, precision motion control, and efficient power management within highly constrained spaces.
Traditional rigid PCBs connected through cables and connectors often struggle to satisfy these requirements. Excessive wiring increases weight, occupies valuable space, introduces potential failure points, and limits mechanical flexibility.
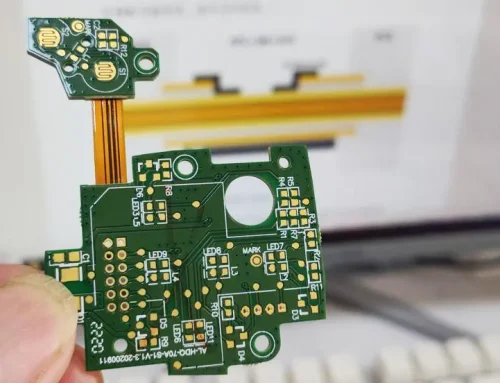
To overcome these challenges, robot manufacturers are increasingly adopting hybrid rigid-flex printed circuit boards (Rigid-Flex PCBs), which combine rigid board sections for component mounting with flexible circuits for dynamic interconnection.
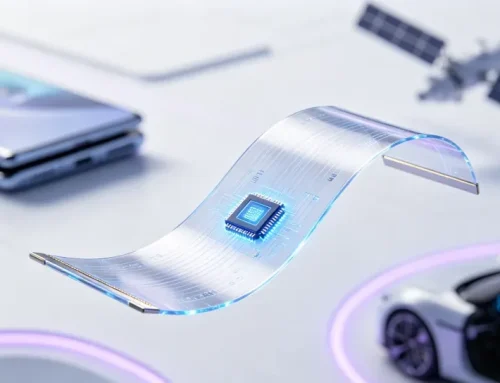
By integrating electrical and mechanical functions into a single structure, rigid-flex technology enables lighter, more compact, and more reliable robotic systems while supporting complex three-dimensional designs.
Industry experts increasingly view rigid-flex boards as a foundational technology for next-generation intelligent robots.
Their ability to reduce connectors, improve signal integrity, and withstand continuous motion makes them particularly valuable in humanoid robots and articulated robotic systems.
Growing Demand for Advanced Electronics in Robotics
The robotics industry is entering a rapid expansion phase. Research forecasts indicate strong growth in humanoid and intelligent service robots throughout the coming decade, driven by advances in AI, sensing technology, and industrial automation.
Hardware remains the largest value contributor in humanoid robot systems, accounting for nearly 80% of total market value due to the complexity of sensors, actuators, control electronics, and mechanical systems.
As robot functionality increases, the number of electronic subsystems also rises dramatically:
| Robotic Function | Electronic Components Required |
|---|---|
| Environmental Perception | Cameras, LiDAR, microphones, IMUs |
| AI Computing | CPUs, GPUs, AI accelerators |
| Motion Control | Servo controllers, encoders, motor drivers |
| Communication | Ethernet, CAN, industrial buses |
| Power Management | Battery monitoring, voltage sensing, protection circuits |
| Human-Machine Interaction | Displays, speakers, tactile sensors |
The challenge is not simply integrating these electronics but doing so while maintaining reliability under vibration, repeated motion, impact, and thermal cycling.
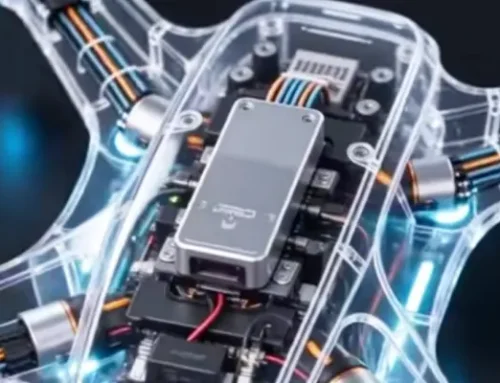
Hybrid rigid-flex boards provide an effective solution by replacing bulky harnesses and multiple interconnects with integrated flexible circuitry.
This architecture reduces weight, improves reliability, and supports compact three-dimensional assembly.
Three Core Application Systems of Hybrid Rigid-Flex PCBs in Robotics
The deployment of rigid-flex technology within robots has gradually evolved into a clear three-system architecture consisting of the head/control system, motion system, and power/signal transmission system.
> Head and Control System: The Robot’s Brain
The robot head contains the highest concentration of computing and sensing electronics. It functions as the central processing hub responsible for perception, decision-making, and interaction with the external environment.
Rigid-flex PCBs are widely used in this area because they enable the integration of multiple electronic modules into compact spaces while maintaining high signal integrity.
High-Performance Computing Platforms
Modern robots rely on powerful processors and AI accelerators to perform machine vision, path planning, object recognition, and autonomous decision-making. These devices generate substantial heat and require mechanically stable mounting structures.
Rigid sections of hybrid boards provide reliable support for CPUs, GPUs, memory modules, and communication processors, while flexible sections interconnect distributed sensor systems without additional wiring.
Vision and Sensor Integration
Robotic perception systems often incorporate:
- RGB cameras
- Depth cameras
- Infrared sensors
- Microphones
- IMUs
The compact form factor of rigid-flex circuits allows these sensors to be positioned precisely within limited head-space while maintaining stable signal transmission.
High-Density Functional Integration
As robot intelligence increases, multiple perception and control functions are consolidated into integrated control units. High-density interconnect (HDI) rigid-flex designs enable dense routing between processors, sensors, memory, and communication modules while minimizing assembly complexity.
> Motion System: The Robot’s Muscles and Joints
The motion system represents one of the most demanding applications for rigid-flex technology because it involves continuous movement and repeated mechanical stress.
Unlike traditional rigid boards, hybrid rigid-flex structures can bend thousands of times while maintaining electrical continuity, making them ideal for robotic joints and articulated mechanisms.
Robotic Arms
Industrial robots and collaborative robots contain multiple rotational axes that require constant communication between sensors, motors, and controllers.
Rigid-flex boards can route signals through moving joints without bulky cable assemblies, reducing wear and improving long-term reliability.
Humanoid Robot Limbs
Humanoid robots contain numerous degrees of freedom in their shoulders, elbows, wrists, hips, knees, and ankles.
Traditional cable harnesses become increasingly difficult to manage as joint count rises. Hybrid rigid-flex circuits simplify internal wiring by allowing electronic pathways to follow complex mechanical movements while occupying minimal space.
Exoskeleton Systems
Wearable robotic exoskeletons demand lightweight and flexible electronic architectures. Rigid-flex boards can conform to the human body’s contours while providing stable mounting areas for control electronics and sensor modules.
This combination improves user comfort while enhancing durability during repeated movement cycles.
Motion System Requirements
| Requirement | Benefit Provided by Hybrid Rigid-Flex Boards |
|---|---|
| Continuous bending | High fatigue resistance |
| Compact joints | Reduced cable volume |
| Dynamic movement | Improved reliability |
| Lightweight design | Lower overall system weight |
| High-density routing | More functions in limited space |
> Power and Signal Transmission System: The Robot’s Nervous System
If the head functions as the brain and the actuators serve as muscles, then the power and communication architecture can be viewed as the robot’s nervous system.
This subsystem distributes power and transmits signals between all functional modules.
Battery Management Systems
Mobile robots and humanoid robots rely heavily on battery systems. Hybrid rigid-flex boards support:
- Cell voltage monitoring
- Temperature sensing
- Battery balancing
- Communication with central controllers
Their flexible structure allows electronic monitoring networks to be distributed efficiently throughout battery packs.
High-Speed Data Communication
Robots generate enormous amounts of data from cameras, force sensors, encoders, and AI processors.
Rigid-flex boards help maintain signal integrity by reducing connector interfaces and shortening transmission paths, which is increasingly important for high-speed communication standards.
Distributed Control Networks
Modern robotic architectures increasingly adopt distributed control systems, where multiple local controllers communicate with a central processor.
Hybrid rigid-flex circuits provide a reliable interconnection platform that reduces assembly complexity while supporting three-dimensional packaging.
Key Advantages Driving Adoption
The widespread use of rigid-flex boards in robotics is driven by measurable engineering benefits.
| Performance Factor | Impact on Robotics |
|---|---|
| Weight Reduction | Improves mobility and energy efficiency |
| Space Savings | Enables compact robotic structures |
| Connector Elimination | Reduces failure points |
| Enhanced Reliability | Improves durability under vibration |
| Better Signal Integrity | Supports high-speed communication |
| 3D Design Freedom | Fits complex mechanical structures |
Compared with traditional multi-board assemblies, rigid-flex architectures significantly reduce the number of connectors and cables while improving overall system robustness.
Multiple industry sources identify space reduction, weight reduction, and increased reliability as the primary reasons for adopting rigid-flex technology in advanced electronic systems.
Motion System and Joints: The Robot’s “Bones and Muscles”
Among all robotic subsystems, the motion system represents the largest application area for hybrid rigid-flex PCBs and the environment where their advantages become most apparent.
Unlike stationary electronic assemblies, robotic joints continuously experience rotation, vibration, acceleration, and mechanical stress.
Electronic interconnects in these locations must not only support power delivery and signal transmission but also survive millions of motion cycles without failure.
Traditional cable harnesses often become a major reliability concern in articulated robots.
Repeated bending can lead to conductor fatigue, insulation wear, connector loosening, and signal degradation. As robots become more compact and incorporate a greater number of degrees of freedom (DOF), wiring complexity increases dramatically.
Hybrid rigid-flex boards address these challenges by combining rigid sections for component mounting with flexible circuits that move seamlessly with the mechanical structure.
Major Joints: Integrating Drive and Control Functions
Large robotic joints such as shoulders, elbows, hips, knees, waists, and wrists contain multiple electronic subsystems within a limited mechanical envelope.
These joints typically house servo motors, harmonic reducers, encoders, motor drivers, and various sensing devices that must operate as a coordinated unit.
Hybrid rigid-flex boards provide a compact platform for integrating these functions.
The rigid sections support power electronics, motor control ICs, and communication interfaces, while flexible sections route signals and power through moving assemblies without requiring bulky wire bundles.
In humanoid robots, each major joint effectively functions as an independent electromechanical control node.
High-performance motor drivers continuously process feedback from encoders and torque sensors while exchanging data with the central controller through high-speed communication networks.
| Joint Function | Electronics Commonly Integrated on Rigid-Flex Boards |
|---|---|
| Motion Control | Motor drivers, servo controllers |
| Position Feedback | Rotary encoders, Hall sensors |
| Torque Monitoring | Force and torque sensors |
| Communication | CAN Bus, EtherCAT interfaces |
| Power Distribution | Power management circuits |
| Safety Monitoring | Temperature and fault detection circuits |
This level of integration reduces connector count, shortens signal paths, and improves overall system reliability while supporting compact joint designs.
Fine-Motor Limbs: High-Density Functional Integration
The hands and feet of advanced robots present even greater integration challenges.
Robotic hands may contain dozens of sensors and multiple miniature actuators within a highly constrained volume.
Human-like dexterity requires precise control of individual finger movements while simultaneously collecting tactile and positional feedback.
Rigid-flex boards serve dual functions in these applications.
They act as servo control platforms while also functioning as sensor substrates capable of supporting pressure sensors, touch sensors, strain gauges, and position-sensing elements.
The ability of flexible circuits to conform to complex three-dimensional geometries enables designers to distribute sensing electronics throughout the hand structure without increasing weight or volume.
This approach is particularly important for humanoid robots that require fine object manipulation, assembly operations, and human-machine interaction.
Recent developments in robotic tactile sensing have further increased the demand for high-density flexible electronic architectures.
Advanced robotic hands may contain hundreds or even thousands of sensing points distributed across fingers and palms, requiring compact interconnection solutions that conventional rigid boards cannot easily provide.
Flexible Interconnections: Replacing Traditional Wiring Harnesses
Perhaps the most significant contribution of rigid-flex technology in robotic motion systems is the replacement of conventional wiring harnesses.
In traditional robotic assemblies, cables must repeatedly bend and twist as joints move. Over time, this mechanical stress can cause conductor fatigue and eventual failure.
Hybrid rigid-flex circuits eliminate many of these vulnerable cable-to-connector interfaces by integrating conductive pathways directly into the mechanical structure.
This design provides several measurable advantages:
| Comparison Factor | Traditional Wiring Harness | Hybrid Rigid-Flex Circuit |
|---|---|---|
| Connector Count | High | Significantly Reduced |
| Assembly Complexity | Complex | Simplified |
| Space Utilization | Lower | Higher |
| Signal Reliability | Connector Dependent | Improved |
| Dynamic Flexibility | Limited | Excellent |
| Maintenance Requirements | Higher | Lower |
Durability becomes particularly important in humanoid robots. Industry reliability testing for dynamic flex circuits commonly targets millions of bending cycles, with well-designed flexible interconnects capable of surviving over 10 million flex cycles under controlled conditions.
IPC standards and flex circuit reliability studies have demonstrated that properly designed rolled-annealed copper conductors and optimized bend radii can significantly improve fatigue resistance compared with conventional cable assemblies.
As robotic systems continue to evolve toward human-like movement patterns, the demand for high-reliability dynamic interconnections is expected to increase substantially.
Connectivity System: The Robot’s “Neural Network”
If the motion system functions as the robot’s muscles and skeleton, the connectivity system serves as its nervous system.
This distributed electronic network spans the entire machine, linking sensors, actuators, controllers, and power sources into a unified operating platform.
Modern robots generate enormous volumes of real-time data.
Cameras, LiDAR systems, inertial measurement units, force sensors, battery management modules, and motor controllers must continuously exchange information with central processing units. Simultaneously, power must be delivered efficiently to dozens of distributed subsystems.
Hybrid rigid-flex boards play a critical role in enabling these functions.
Battery Interconnection and Energy Management
Power systems represent one of the most important applications for rigid-flex technology in humanoid and mobile robots. Battery packs often occupy significant portions of the torso and must maximize energy density while maintaining safety and reliability.
Rigid-flex circuits are increasingly replacing traditional battery harnesses by providing integrated voltage sampling, temperature monitoring, balancing connections, and communication pathways.
Compared with conventional wiring solutions, flexible interconnect systems reduce assembly complexity and improve packaging efficiency.
This advantage becomes particularly valuable in humanoid robots, where designers must balance battery capacity, weight distribution, and available internal space.
The growing adoption of lithium-ion battery systems has further increased demand for compact battery monitoring architectures.
Battery management systems (BMS) depend on accurate voltage and temperature measurements across multiple cells, making reliable interconnection networks essential for operational safety.
High-Speed Communication Backbone
Artificial intelligence applications require robots to process unprecedented amounts of sensor data.
High-resolution cameras, depth sensors, force feedback systems, and distributed controllers generate continuous streams of information that must be transmitted with minimal latency.
Hybrid rigid-flex boards serve as high-speed communication backbones connecting the robot’s main processing platform with peripheral subsystems.
By reducing connector interfaces and shortening transmission distances, they help maintain signal integrity across increasingly complex electronic architectures.
Modern robotic platforms commonly employ communication protocols such as:
| Communication Protocol | Typical Application |
|---|---|
| CAN Bus | Motor and sensor control |
| CAN FD | High-speed industrial communication |
| EtherCAT | Real-time motion control |
| Ethernet | AI processing and vision systems |
| RS-485 | Distributed industrial devices |
As data rates continue to increase, rigid-flex architectures provide advantages in impedance control, electromagnetic compatibility, and routing density that support reliable communication performance.
Distributed Intelligence Architecture
A growing number of advanced robots are transitioning from centralized control architectures to distributed computing models. Instead of relying solely on a single central controller, intelligence is increasingly distributed among multiple local processing nodes positioned throughout the robot.
This architecture reduces communication latency, improves fault tolerance, and enables more responsive control.
Hybrid rigid-flex boards facilitate these distributed systems by creating compact, reliable connections between local controllers, sensors, and actuators.
In many respects, these interconnection networks mirror the biological nervous system. Sensors gather information, local controllers process data, communication pathways transmit signals, and central processors coordinate overall behavior.
Hybrid rigid-flex technology provides the physical infrastructure that allows this electronic nervous system to function efficiently within increasingly sophisticated robotic platforms.
As humanoid robots move toward greater autonomy, higher dexterity, and more natural movement, the importance of robust connectivity architectures will continue to grow.
Hybrid rigid-flex PCBs are becoming a foundational technology that enables seamless integration between power, sensing, communication, and control systems throughout the entire robotic body.
Differences in Robot Applications by Type
As robotic systems diversify across industrial, service, medical, and humanoid domains, the functional role of hybrid rigid-flex PCBs shifts accordingly.
While the underlying technology remains consistent—combining rigid structural sections with flexible interconnects—the design priorities vary significantly depending on mechanical complexity, safety requirements, motion frequency, and system integration density.
Humanoid Robots: Maximum Integration and Human-Like Motion Complexity
Humanoid robots represent the most demanding application environment for rigid-flex technology.
Their architecture attempts to replicate human biomechanics, requiring a high number of degrees of freedom distributed across the torso, arms, hands, and legs.
Each joint must coordinate real-time sensing, actuation, and feedback under continuous motion.
In this category, rigid-flex boards are not simply interconnect solutions but core system enablers.
They support dense integration of motor control electronics, distributed sensing networks, and high-speed communication lines within extremely constrained anatomical spaces.
Market projections indicate that humanoid robot shipments are expected to scale rapidly in the coming decade.
Industry estimates suggest cumulative shipments could reach approximately 600,000 units by 2029, driven by labor substitution, logistics automation, and AI-assisted service applications.
This growth directly translates into rising demand for compact, high-reliability interconnect technologies such as rigid-flex PCBs.
A notable characteristic of humanoid design is the increasing electronic complexity of end-effectors.
Robotic hands, in particular, are evolving toward multi-sensor architectures that integrate tactile sensing, force feedback, and fine motor actuation.
Flexible torque sensing elements embedded within rigid-flex structures enable real-time grasp adjustment, allowing robots to manipulate fragile or irregular objects with greater precision.
| Humanoid Robot Subsystem | Role of Rigid-Flex PCB |
|---|---|
| Joints (multi-DOF) | Motor control + feedback integration |
| Hands | High-density tactile + torque sensing |
| Head module | AI compute + vision + audio integration |
| Torso | Power distribution + communication backbone |
The convergence of computing, sensing, and actuation within a single mechanical frame makes rigid-flex design not just beneficial but structurally necessary.
Industrial and Service Robots: Reliability and Space Optimization
Industrial robots prioritize deterministic performance, high uptime, and long lifecycle reliability.
In these systems, rigid-flex PCBs are primarily used to replace cable harnesses in rotating joints and modular assemblies. The focus is less on extreme human-like flexibility and more on stable signal integrity, vibration resistance, and reduced maintenance requirements.
In industrial robotic arms, each axis typically contains motor drives, encoders, and control electronics that must operate under high torque loads and continuous duty cycles.
Rigid-flex circuits reduce connector dependency and eliminate many failure-prone cable interfaces, improving overall system MTBF (Mean Time Between Failures).
Service robots—such as delivery robots, cleaning robots, and hospitality robots—operate in environments where compact internal architecture is critical.
These systems often prioritize space efficiency over mechanical complexity.
Rigid-flex boards allow designers to fold circuitry into three-dimensional configurations, freeing internal volume for batteries, sensors, and mechanical components.
The distinction between industrial and service robots can be summarized as follows:
| Category | Primary Design Driver | Role of Rigid-Flex PCB |
|---|---|---|
| Industrial Robots | Reliability & uptime | Replace harnesses, improve durability |
| Service Robots | Compactness & cost efficiency | Enable space-saving integration |
Although requirements differ, both categories benefit from reduced wiring complexity and improved electrical robustness, especially in environments with vibration and repetitive motion.
Medical and Rehabilitation Robots: Safety-Critical Flexibility
Medical robotics represents the most safety-sensitive application domain for rigid-flex technology.
These systems include surgical robots, rehabilitation exoskeletons, diagnostic automation platforms, and minimally invasive devices. In such applications, failure is not merely a technical issue but a patient safety risk.
Regulatory frameworks such as IPC Class 3 define the highest reliability standards for electronic assemblies used in life-critical systems.
Rigid-flex PCBs used in surgical robots are often designed to meet or exceed these standards, emphasizing trace redundancy, controlled impedance, fatigue resistance, and strict material qualification.
Rehabilitation robots present a particularly demanding mechanical environment.
These devices assist patient movement and must operate through repeated flexion cycles, often within constrained angular ranges such as ±90°. Over time, conventional wiring systems can degrade under cyclic mechanical stress.
Through optimized rigid-flex designs—particularly those using rolled annealed copper and carefully controlled bend radii—service life can be significantly extended.
In many engineered systems, cycle life improvements from approximately 50,000 cycles to over 150,000 cycles have been reported under controlled conditions, depending on mechanical design and loading profiles.
| Medical Robot Type | Key Requirement | Rigid-Flex Contribution |
|---|---|---|
| Surgical Robots | Ultra-high reliability | IPC Class 3 compliant interconnects |
| Rehabilitation Robots | Cyclic durability | Extended flex cycle life |
| Diagnostic Systems | Signal integrity | Low-noise sensor integration |
In these systems, rigid-flex technology plays a dual role: ensuring electrical reliability while enabling compact, ergonomically optimized mechanical design.
Conclusion: Rigid-Flex PCBs as the Structural Backbone of Intelligent Robotics
Across humanoid, industrial, service, and medical robotics, a consistent trend emerges: increasing system integration density combined with escalating demands for mechanical flexibility and electrical reliability.
As robotic systems evolve from rigid, segmented machines into highly integrated intelligent platforms, traditional wiring-based architectures are becoming a limiting factor.
Hybrid rigid-flex PCBs address this limitation by merging structural support and dynamic electrical connectivity into a unified platform.
Their ability to replace bulky harnesses, reduce connector dependency, and maintain signal integrity under continuous motion makes them a foundational enabling technology for modern robotics.
From an engineering perspective, rigid-flex systems effectively transform electronic architecture from a two-dimensional layout into a three-dimensional mechanical-electrical structure.
This shift is particularly critical in humanoid robotics, where spatial constraints and motion complexity converge, and in medical systems where reliability and safety requirements are stringent.
The following table summarizes the key role differentiation across robot categories:
| Robot Type | Primary Challenge | Value of Rigid-Flex Technology |
|---|---|---|
| Humanoid Robots | High DOF + extreme integration | Enables human-like motion and compact design |
| Industrial Robots | Reliability under continuous operation | Reduces failure points and maintenance |
| Service Robots | Space and cost constraints | Supports compact 3D integration |
| Medical Robots | Safety-critical performance | Ensures compliance and durability |
Looking forward, as robotics continues to advance toward greater autonomy, dexterity, and intelligence, the demand for highly integrated electronic systems will continue to expand.
Emerging trends such as AI-driven motion controlhttps://www.morphstudio.com/ai-motion-control, distributed sensing networks, and soft robotics will further increase reliance on flexible and hybrid interconnect technologies.
In this context, rigid-flex PCBs are expected to evolve from a supporting interconnect solution into a core architectural element of robotic design—functioning as the physical backbone that unifies computation, sensing, actuation, and power distribution into a cohesive intelligent system.
References
- IPC-2223: Sectional Design Standard for Flexible Printed Boards
- IPC-6013: Qualification and Performance Specification for Flexible Printed Boards
- IEEE Robotics and Automation Society – Humanoid Robotics Systems Overview
- IDTechEx, “Humanoid Robot Hardware and Electronics Market Forecast 2025–2035”
- MarketsandMarkets, “Medical Robotics Market Report”
- Grand View Research, “Humanoid Robot Market Size and Growth Analysis”
- ISO 13485 Medical Device Quality Management Systems